The 800 Series Controller has Decades of Improvements and Enhancements, Making it the World's Most Advanced MIMO Vibration Controller
With its advanced feature set, there is very little the 800 Series Controller hasn’t seen and conquered.
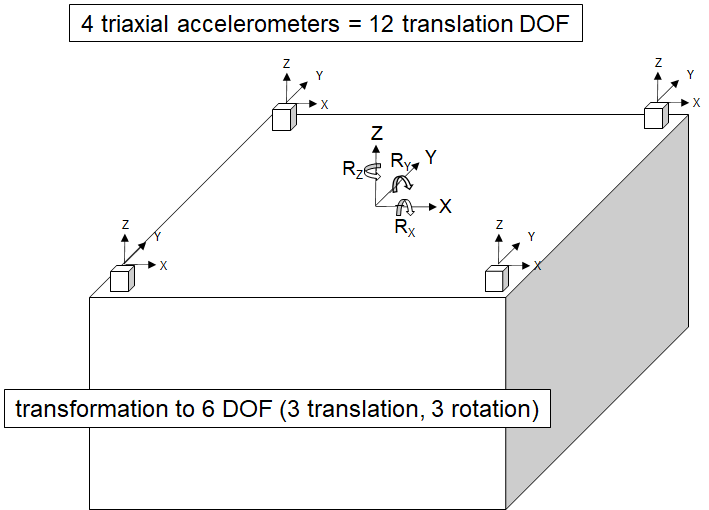
Kinematic Transformation
The Kinematic Transformation functionality takes your physical accelerometers and maps them to “virtual” channels representing the translations and rotations about a selected center point. This has countless advantages over the traditional process of assigning a profile to a physical control accelerometer.
Map physical channels to “virtual” channels, which represent the translation/rotation about a certain point
“Virtual” channels operate like physical channels, and can be used for control or measure
Enter reference profiles as translations and rotations about the origin by selecting the translation/rotation
Control accelerometer locations entered into the software, and the transformation matrix is computed automatically
No need to change profiles based on control accelerometer locations
Simplifies translating profiles recorded in the real world to profiles in the controller – No need for accelerometer locations to be the same on the shaker as they were during acquisition
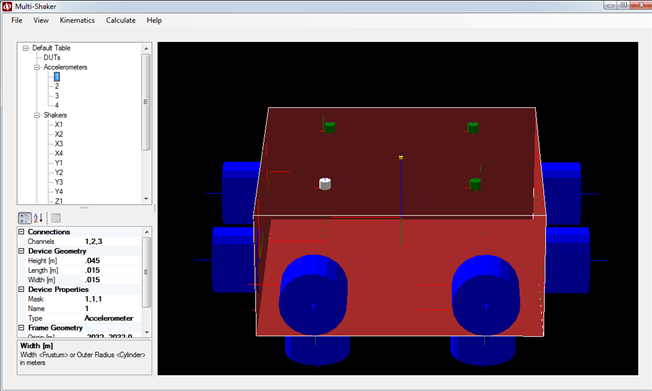
Virtual Test Point
Create a virtual Test Point that represents the translations about any arbitrary point in space
Test Points can compute accelerations at a location which can not physically house an accelerometer
Test Point vibrations computed from surrounding accelerometers
Accelerometer geometries entered into setup
Advanced Notching in MIMO Sine and MIMO Random
Notching is a critical part of testing a high value test article. The 800 Series Controller has undergone many optimizations in its notching algorithms and boasts a stable, fast notch response unseen in any other MIMO controllers.
MIMO Sine
Realtime active notching, optimized to maintain stability and minimize overshoot
Preemptive notching begins notching when a notch channel’s slope indicates it will soon exceed its profile
MIMO Random
Predictive Notching – Initially based on Pretest and updated during the test
Standard notching (drop all drives proportionally) or Advanced notching (drop only the drives which will affect the Notch channel)
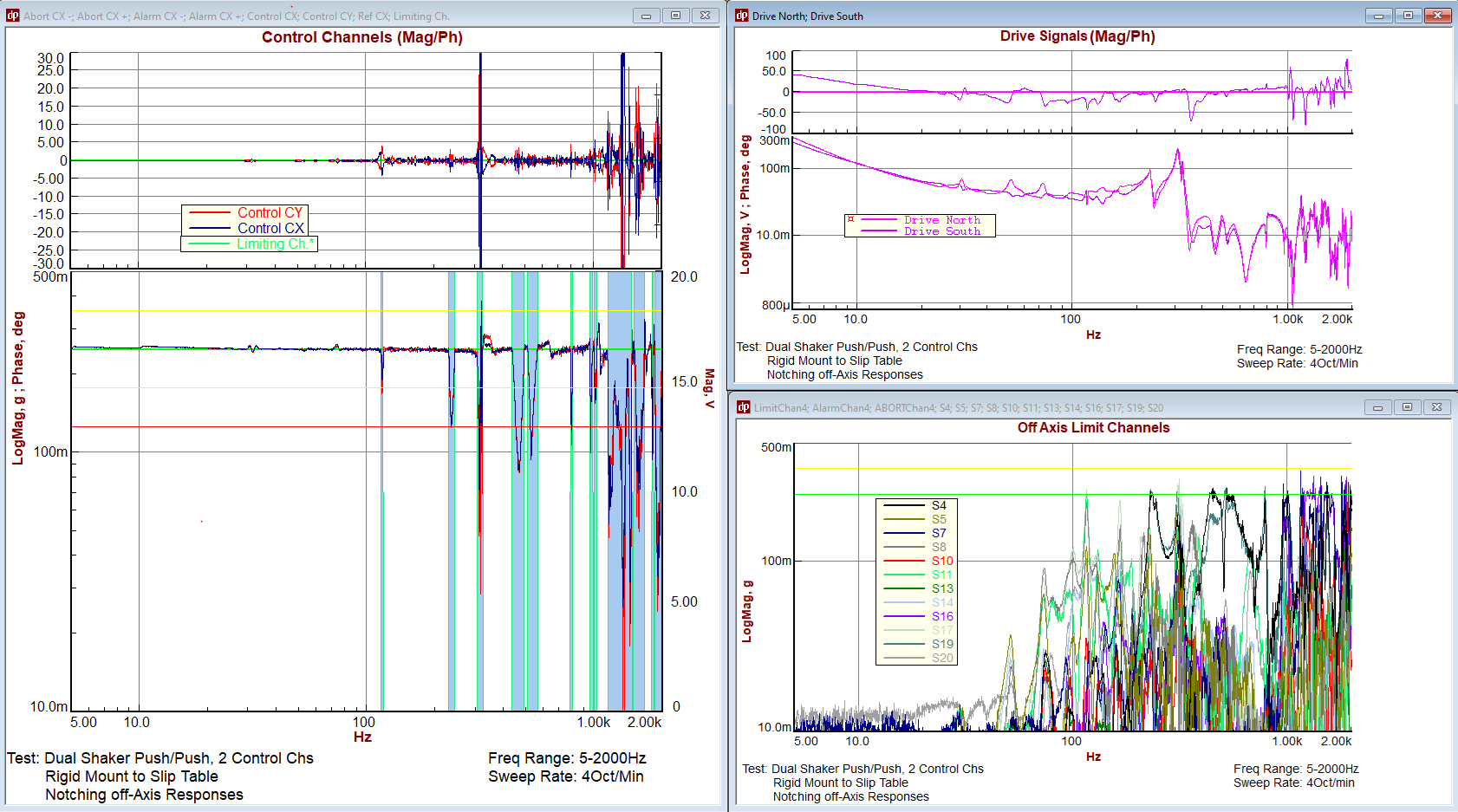
Data from a 2-shaker, 4Oct/min MIMO 5-2000Hz Sine sweep with notching is shown below. Two ~20000lbf shakers were rigidly attached to a large, 14’x14′ T-shaped slip table. There are countless resonances in the sweep band. Two control points were controlled to be kept in-phase near the armature’s attachment points. Notching was applied to off-axis accelerometers at various points around the slip table. The controller maintains control through the countless resonances, while preventing all control/limit channels from even reaching +3dB of the reference/notch profile. The only phase excursions happen when notching dips the control amplitude into the noise, where phase is not critical and can not be quantified well.
Notching performance is critical to protect valuable test articles – and the advanced notching algorithms in our MIMO Sine Controller outperform those seen in most single-shaker controllers.
Click to Enlarge. Dual Shaker with Rigid Attachment to Table, with Limiting/Notching in the off-axis
Overdetermined Control
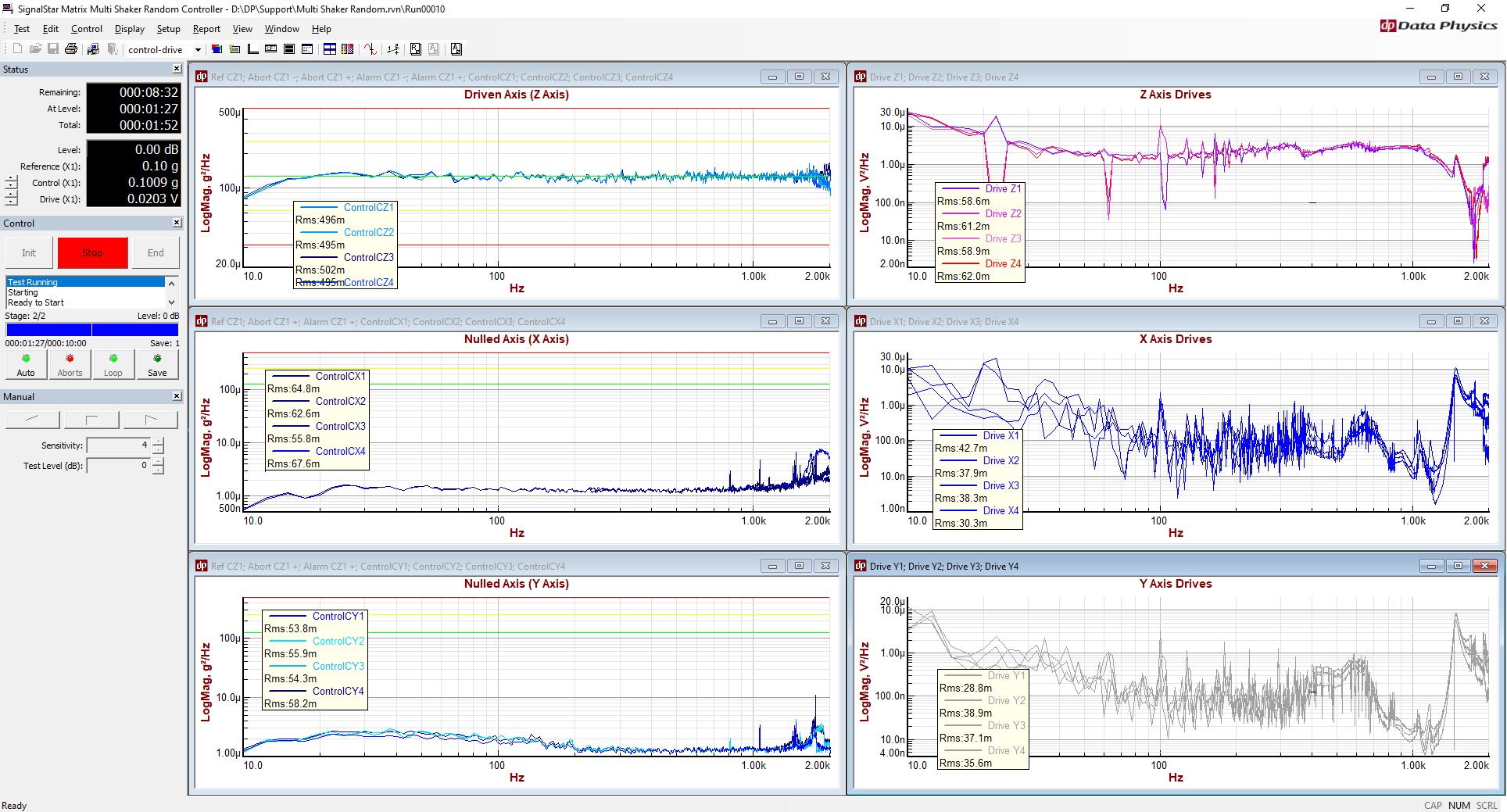
The most advanced shaker table setups are over-actuated, and contain more actuators than rigid degrees of freedom. Bearings allowing for full six degree of freedom motion. Below is a TEAM Tensor – one such table with 12 actuators and full 6DoF motion.
Team Corporation Tensor (4 shakers in each X/Y/Z axis) - Controlled with 4 triaxial accelerometers. Driving Z Axis and controlling the X and Y to null; including modal deformation at higher frequencies.
Tensor 12 Shaker 6-DoF Table
There are 6 more actuators than are required for 6DoF motion. But, the 800 Series controller drives all twelve actuators to control all 3 translations and 3 rotations simultaneously and doubling the force output compared to a system with 6 actuators.
The controller takes care to ensure that the actuators do not fight each other during test – which would damage the amplifiers or shakers. It drives 12 actuators so that – when there are extra actuators in one axis – the force output is split evenly between them. This is all done numerically and automatically, without even having to define which actuator is pointed in which direction.
At higher frequencies, the controller can use the additional actuators to counteract the table’s natural modeshapes (each seen as an extra degree of freedom) and keep the table rigid past its modal frequencies. During a sine sweep or random test, the controller simultaneously uses 6DoF control at the lower frequencies, and counteracts the modeshapes at the higher frequencies where modes are present. This is visible in the control plots – four control channels in each axis – all kept at the same amplitude (and phase – though phase is not shown in the plot)