Shock Response Spectra (SRS) are now widely used in many industries. Data Physics signal analyzers and controllers make the process of measuring Shock Response Spectra and producing transients from a given Shock Response Spectra easy. The difficulties, however, may be in understanding what an SRS is and how it is used for shock testing.
What is Shock Response Spectra (SRS)?
The Shock Response Spectrum was first conceived by Dr. Maurice Biot in 1932 to characterize earthquakes. It was initially used by the Navy in the early 1960s as an indicator of mechanical shock severity. Currently SRS is widely used as a design specification tool for impulsive load characterization such as:
Earthquakes
Drop impact
Launch forces
Stage separation forces
Pyrotechnic events
A common misconception with Shock Response Spectra is that it is a frequency domain signal. In fact, the Shock Response Spectra is actually calculated from the peak time domain response of a single degree of freedom system.
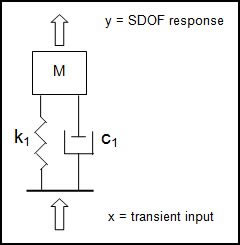
To understand SRS, you must first look at the response of a single degree of freedom (SDOF) system to a transient input. The diagram below shows a single degree of freedom system characterized by a mass supported by a spring and damper system.
Spring Mass Damper
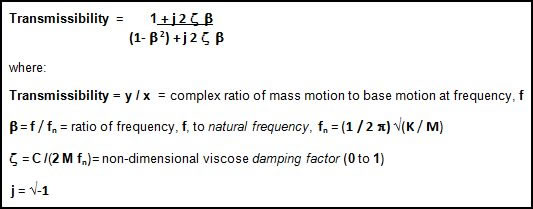
The transmissibility between the transient input and the single degree of freedom response is given by the following equation:
Transmissibility Calculation
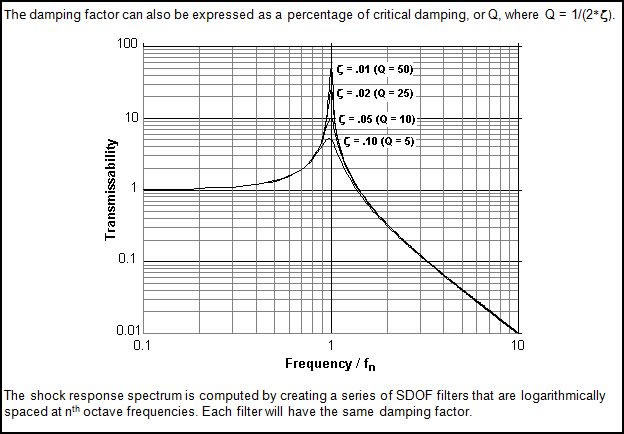
The ratio of the spring stiffness to the mass determines the natural frequency of the SDOF system. The transmissibility of the input to the response is shown in the graph below. The resonance results in amplification of the response signal near the resonance frequency and attenuation of the response above the natural frequency. The damping factor influences the amount of amplification at resonance.
The damping factor can also be expressed as a percentage of critical damping, or Q, where:
Damping Q zeta
Lightly Damped Transmissibility
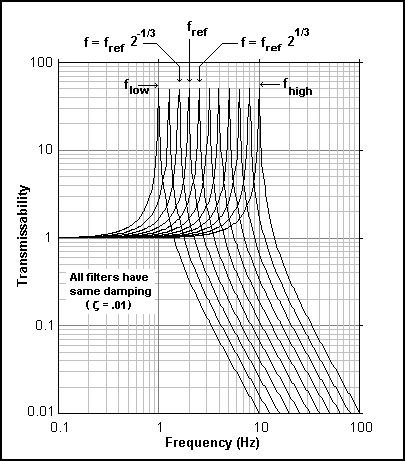
The shock response spectrum is computed by creating a series of SDOF filters that are logarithmically spaced at nth octave frequencies. Each filter will have the same damping factor.
Multiple Lightly Damped Transmissibilities
Types of Peak Response Signals in SRS
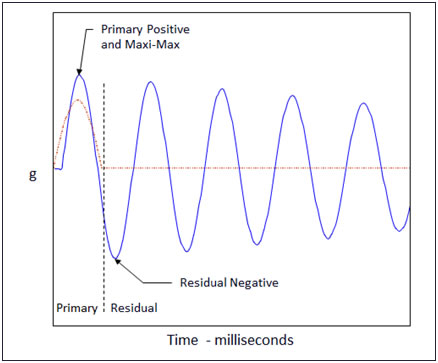
The time domain response of a single degree of freedom system is computed using the SDOF filters and the peak value is used in the SRS. There are several types of peak response signals that can be used in SRS. First, the response time history computed from the SDOF filter is separated into two sections. The section of the SDOF response during the excitation is referred to as the Primary response and the section of the SDOF response after the excitation has ended is referred to as the Residual response. The highest absolute values of the Positive and Negative responses in both the Primary and Residual portions of SDOF response are used for the different types of SRS measurements. Overall maximum absolute value of the SDOF response is referred to as the Maxi-max.
SRS types include:
Maxi-max
Primary Positive
Primary Negative
Residual Positive
Residual Negative
These are illustrated in the following graph.
Lightly Damped SDOF Response
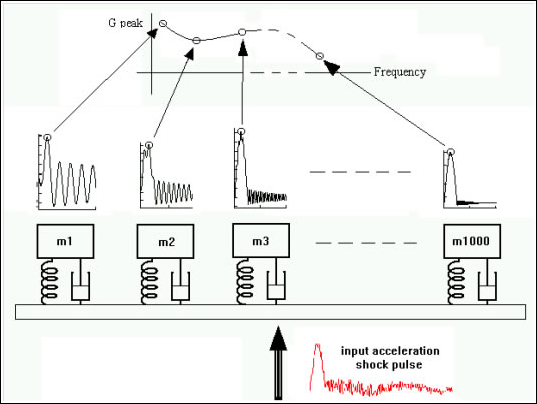
The Shock Response Spectrum is created by graphing the peak single degree of freedom response of a series of SDOF systems versus the natural frequency of each SDOF system. This is typically done with a logarithmic frequency axis at nth octave spacing. This is illustrated in the figure below.
SRS Plot Computation
The damping values used in an SRS measurement are constant for all frequencies. For pyrotechnic events the damping used is typically 5% critical damping. In earthquake testing, 2% critical damping is typically used.
The highest damage potential due to a shock input is at the natural frequencies of the test article. The SDOF model is used to predict the response of a product at its natural frequency to a given shock input. Since the natural frequency can be anywhere within the test frequency range, the SRS computes the peak SDOF response as a function of frequency at nth octave spacing.
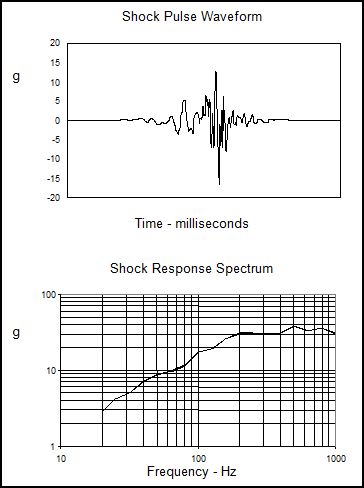
The graphs below show a shock pulse and its Shock Response Spectra. Note that the peak on the pulse waveform is only about 17 g’s while the peak Shock value for SRS is 40 g’s. This higher amplitude is typical of SRS and is due to the amplification that occurs due to the resonance.